大连理工大学
团队01-水质检测机器鱼

参赛作品:水质检测机器鱼
参赛院校:大连理工大学软件学院
团队负责人:翁某某
团队成员:魏某某
指导老师:章某某
参赛院校:大连理工大学软件学院
团队负责人:翁某某
团队成员:魏某某
指导老师:章某某

翁某某,研二在读,主修电路与系统学科下的电子系统信息集成方向,研究生阶段负责研发企业合作项目2项;2014年参加台湾学术交流会议,时间为1周;2013年参加过ARM-STM32 2013校园创新大赛;发表中文核心期刊论文2篇,EI会议论文1篇,发明专利3项,实用新型专利3项;本科参加2011全国大学生电子设计大赛等赛事,拥有丰富的参赛经验、较好的理论基础和动手实践能力。
魏某某,研一在读,主修电路与系统下的电子系统信息集成方向,研究生阶段参加了“浙江省新苗人才计划”;参与“海底环境原位监测数据采集系统”项目,具有较强的科研分析和动手实践能力。
魏某某,研一在读,主修电路与系统下的电子系统信息集成方向,研究生阶段参加了“浙江省新苗人才计划”;参与“海底环境原位监测数据采集系统”项目,具有较强的科研分析和动手实践能力。

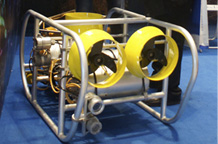
海洋资源的勘探与开发能力水平,是衡量国家海洋技术水平的重要标志。在近年来的国家大洋科学考察中发现,由于海底地形的复杂多样,对于海洋装备来说,平稳地沉底着陆是一项比较困难的工作。无论是需要精确平衡的海底取样钻机,还是需要沉底观测的ROV、AUV和HOV,在复杂的海底环境下,一个平稳的着陆将会是后续一系列钻探、观测等工作的保障。
本作品是在研究和分析了国内外海底装备着陆及调平的基础上,提出一种新的着陆和调平机制,建立相应的数学模型,设计一种简单可行的自适应水下着陆的算法,并结合具有仿真价值的低成本传感器和实验室水池环境,实现一套水下自适应着陆器的实验室仿真实物模型。
本作品是在研究和分析了国内外海底装备着陆及调平的基础上,提出一种新的着陆和调平机制,建立相应的数学模型,设计一种简单可行的自适应水下着陆的算法,并结合具有仿真价值的低成本传感器和实验室水池环境,实现一套水下自适应着陆器的实验室仿真实物模型。